If you think your programs crashing before, wait until they crash ten times as fast - Bhuvy
A thread is short for ‘thread-of-execution’. It represents the sequence
of instructions that the CPU has and will execute. To remember how to
return from function calls, and to store the values of automatic
variables and parameters a thread uses a stack. Almost weirdly, a thread
is a process, meaning that creating a thread is similar to fork,
except there is no copying meaning no copy on write. What this
allows is for a process to share the same address space, variables,
heap, file descriptors and etc. The actual system call to create a
thread is similar to fork. It’s clone. We won’t go into the
specifics, but you can read the
http://man7.org/linux/man-pages/man2/clone.2.html
keeping in mind that it is outside the direct scope of this course. LWP
or Lightweight Processes or threads are preferred to forking for a lot
of scenarios because there is a lot less overhead creating them. But in
some cases, notably python uses this, multiprocessing is the way to make
your code faster.
Processes vs threads#
Creating separate processes is useful when
-
When more security is desired. For example, Chrome browser uses different processes for different tabs.
-
When running an existing and complete program then a new process is required, for example starting ‘gcc’.
-
When you are running into synchronization primitives and each process is operating on something in the system.
-
When you have too many threads – the kernel tries to schedule all the threads near each other which could cause more harm than good.
-
When you don’t want to worry about race conditions
-
If one thread blocks in a task (say IO) then all threads block. Processes don’t have that same restriction.
-
When the amount of communication is minimal enough that simple IPC needs to be used.
On the other hand, creating threads is more useful when
-
You want to leverage the power of a multi-core system to do one task
-
When you can’t deal with the overhead of processes
-
When you want communication between the processes simplified
-
When you want to threads to be part of the same process
Thread Internals#
Your main function and other functions has automatic variables. We will store them in memory using a stack and keep track of how large the stack is by using a simple pointer (the “stack pointer”). If the thread calls another function, we move our stack pointer down, so that we have more space for parameters and automatic variables. Once it returns from a function, we can move the stack pointer back up to its previous value. We keep a copy of the old stack pointer value - on the stack! This is why returning from a function is quick. It’s easy to ‘free’ the memory used by automatic variables because the program needs to change the stack pointer.
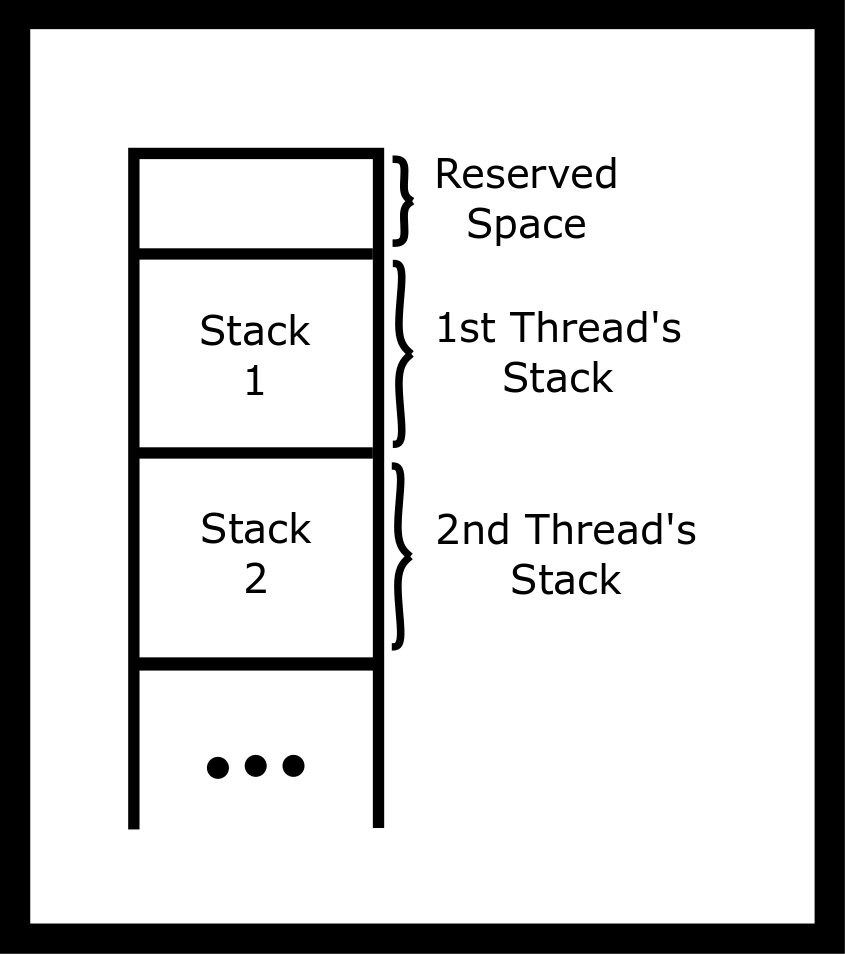
In a multi-threaded program, there are multiple stacks but only one
address space. The pthread library allocates some stack space and uses
the clone function call to start the thread at that stack address.
A program can have more than one thread running inside a process. The
programget the first thread for free! It runs the code you write inside
‘main’. If a program need more threads, it can call pthread_create to
create a new thread using the pthread library. You’ll need to pass a
pointer to a function so that the thread knows where to start.
The threads all live inside the same virtual memory because they are part of the same process. Thus they can all see the heap, the global variables, and the program code.
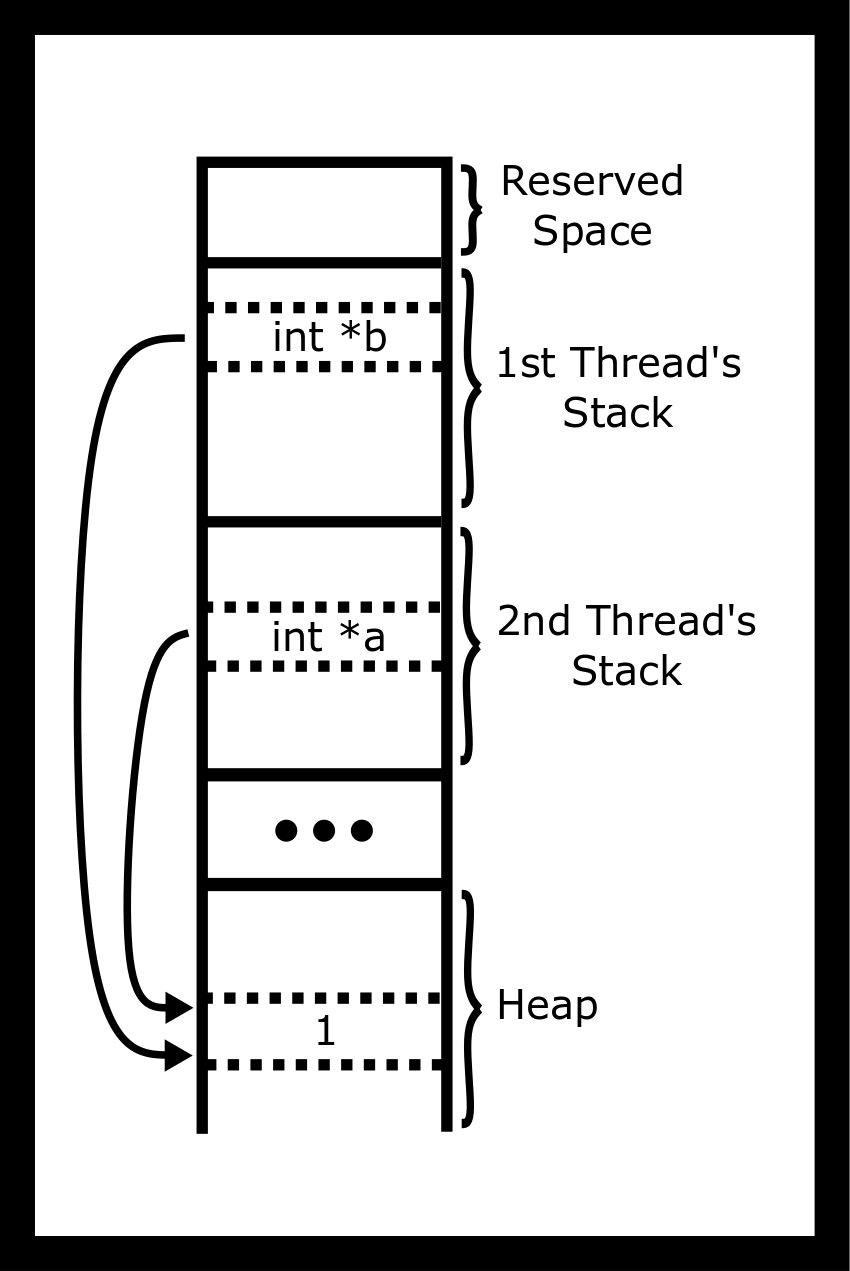
Thus, a program can have two (or more) CPUs working on your program at the same time and inside the same process. It’s up to the operating system to assign the threads to CPUs. If a program has more active threads than CPUs, the kernel will assign the thread to a CPU for a short duration or until it runs out of things to do and then will automatically switch the CPU to work on another thread. For example, one CPU might be processing the game AI while another thread is computing the graphics output.
Simple Usage#
To use pthreads, include pthread.h and compile and link with
-pthread or -lpthread compiler option. This option tells the
compiler that your program requires threading support. To create a
thread, use the function pthread_create. This function takes four
arguments:
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
-
The first is a pointer to a variable that will hold the id of the newly created thread.
-
The second is a pointer to attributes that we can use to tweak and tune some of the advanced features of pthreads.
-
The third is a pointer to a function that we want to run
-
Fourth is a pointer that will be given to our function
The argument void *(*start_routine) (void *) is difficult to read! It
means a pointer that takes a void * pointer and returns a void *
pointer. It looks like a function declaration except that the name of
the function is wrapped with (* .... )
#include <stdio.h>
#include <pthread.h>
void *busy(void *ptr) {
// ptr will point to "Hi"
puts("Hello World");
return NULL;
}
int main() {
pthread_t id;
pthread_create(&id, NULL, busy, "Hi");
void *result;
pthread_join(id, &result);
}
In the above example, the result will be NULL because the busy
function returned NULL. We need to pass the address-of result because
pthread_join will be writing into the contents of our pointer.
In the man pages, it warns that programmers should use pthread_t as an
opaque type and not look at the internals. We do ignore that often,
though.
Pthread Functions#
Here are some common pthread functions.
-
pthread_create. Creates a new thread. Every thread gets a new stack. If a program callspthread_createtwice, Your process will contain three stacks - one for each thread. The first thread is created when the process start, the other two after the create. Actually, there can be more stacks than this, but let’s keep it simple. The important idea is that each thread requires a stack because the stack contains automatic variables and the old CPU PC register, so that it can go back to executing the calling function after the function is finished. -
pthread_cancelstops a thread. Note the thread may still continue. For example, it can be terminated when the thread makes an operating system call (e.g.write). In practice,pthread_cancelis rarely used because a thread won’t clean up open resources like files. An alternative implementation is to use a boolean (int) variable whose value is used to inform other threads that they should finish and clean up. -
pthread_exit(void *)stops the calling thread meaning the thread never returns after callingpthread_exit. The pthread library will automatically finish the process if no other threads are running.pthread_exit(...)is equivalent to returning from the thread’s function; both finish the thread and also set the return value (void *pointer) for the thread. Callingpthread_exitin themainthread is a common way for simple programs to ensure that all threads finish. For example, in the following program, themyfuncthreads will probably not have time to get started. On the other handexit()exits the entire process and sets the process’ exit value. This is equivalent toreturn ();in the main method. All threads inside the process are stopped. Note thepthread_exitversion creates thread zombies; however, this is not a long-running process, so we don’t care.int main() { pthread_t tid1, tid2; pthread_create(&tid1, NULL, myfunc, "Jabberwocky"); pthread_create(&tid2, NULL, myfunc, "Vorpel"); if (keep_threads_going) { pthread_exit(NULL); } else { exit(42); //or return 42; } // No code is run after exit } -
pthread_join()waits for a thread to finish and records its return value. Finished threads will continue to consume resources. Eventually, if enough threads are created,pthread_createwill fail. In practice, this is only an issue for long-running processes but is not an issue for simple, short-lived processes as all thread resources are automatically freed when the process exits. This is equivalent to turning your children into zombies, so keep this in mind for long-running processes. In the exit example, we could also wait on all the threads.// ... void* result; pthread_join(tid1, &result); pthread_join(tid2, &result); return 42; // ...
There are many ways to exit threads. Here is a non-complete list.
-
Returning from the thread function
-
Calling
pthread_exit -
Canceling the thread with
pthread_cancel -
Terminating the process through a signal.
-
calling
exit()orabort() -
Returning from
main -
Executing another program
-
Unplugging your computer
-
Some undefined behavior can terminate your threads, it is undefined behavior
Race Conditions#
Race conditions are whenever the outcome of a program is determined by its sequence of events determined by the processor. This means that the execution of the code is non-deterministic. Meaning that the same program can run multiple times and depending on how the kernel schedules the threads could produce inaccurate results. The following is the canonical race condition.
void *thread_main(void *p) {
int x = *p;
x += x;
*p = x;
return NULL;
}
int main() {
int data = 1;
pthread_t one, two;
pthread_create(&one, NULL, thread_main, &data);
pthread_create(&two, NULL, thread_main, &data);
pthread_join(one, NULL);
pthread_join(two, NULL);
printf("%d\n", data);
return 0;
}
Breaking down the assembly there are many different accesses of the
code. We will assume that data is stored in the eax register. The code
to increment is the following with no optimization (assume int_ptr
contains eax).
mov eax, DWORD PTR [rbp-4] ;Loads int_ptr
add eax, eax ;Does the addition
mov DWORD PTR [rbp-4], eax ;Stores it back
Consider this access pattern.
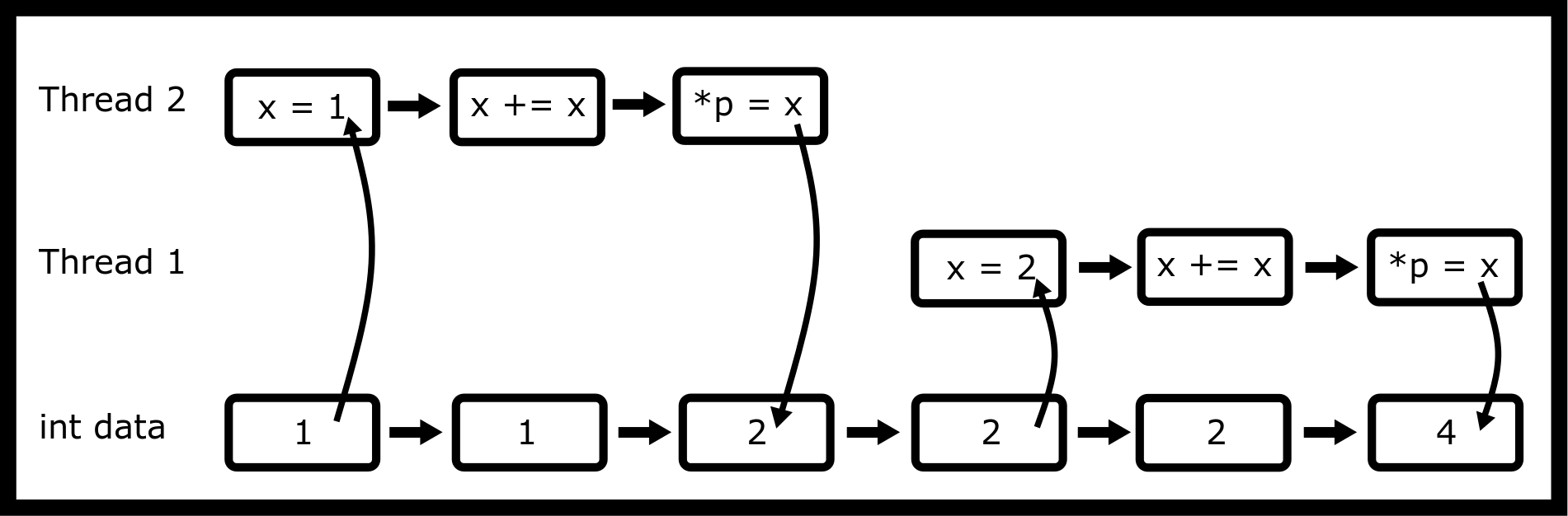
This access pattern will cause the variable data to be 4. The problem
is when the instructions are executed in parallel.
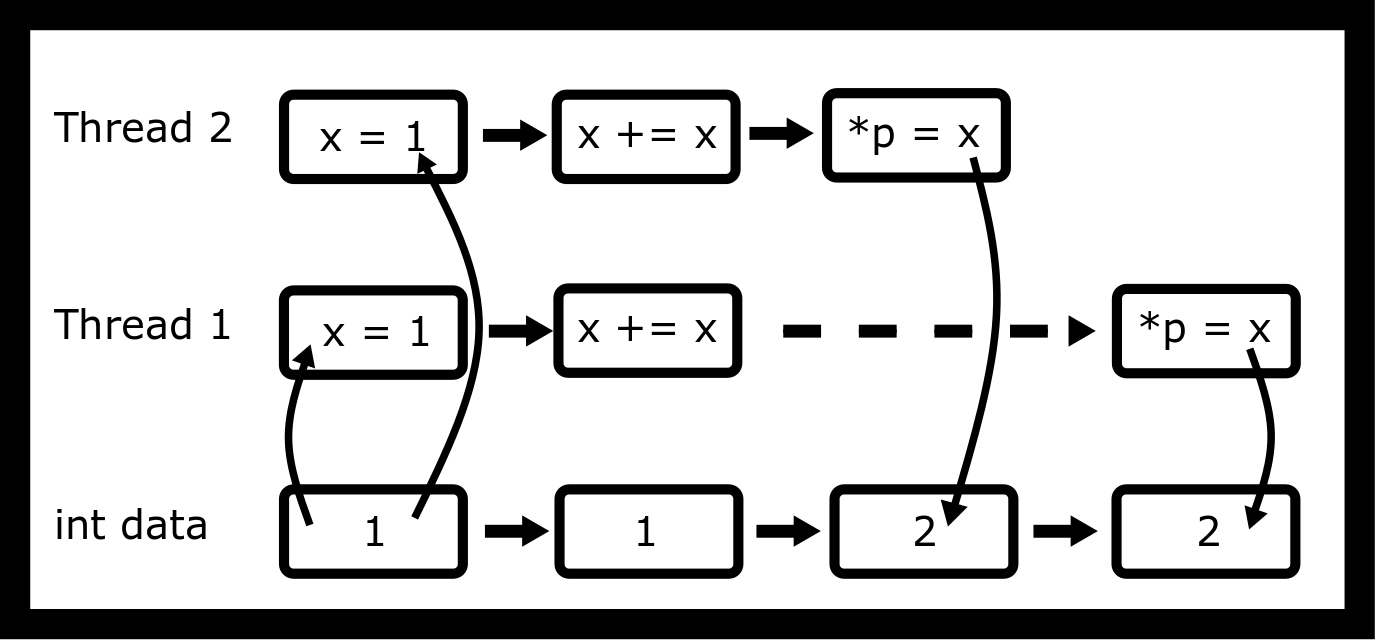
This access pattern will cause the variable data to be 2. This is
undefined behavior and a race condition. What we want is one thread to
access the part of the code at a time.
But when compiled with -O2, assembly output is a single instruction.
shl dword ptr [rdi] # Optimized way of doing the add
Shouldn’t that fix it? It is a single assembly instruction so no interleaving? It doesn’t fix the problems that the hardware itself may experience a race condition because we as programmers didn’t tell the hardware to check for it. The easiest way is to add the lock prefix (Guide #ref-guide2011intel, 1120).
But we don’t want to be coding in assembly! We need to come up with a software solution to this problem.
A day at the races
Here is another small race condition. The following code is supposed to
start ten threads with the integers 0 through 9 inclusive. However, when
run prints out 1 7 8 8 8 8 8 8 8 10! Or seldom does it print out what
we expect. Can you see why?
#include <pthread.h>
void* myfunc(void* ptr) {
int i = *((int *) ptr);
printf("%d ", i);
return NULL;
}
int main() {
// Each thread gets a different value of i to process
int i;
pthread_t tid;
for(i =0; i < 10; i++) {
pthread_create(&tid, NULL, myfunc, &i); // ERROR
}
pthread_exit(NULL);
}
The above code suffers from a race condition - the value of i is
changing. The new threads start later in the example output the last
thread starts after the loop has finished. To overcome this
race-condition, we will give each thread a pointer to its own data area.
For example, for each thread we may want to store the id, a starting
value and an output value. We will instead treat i as a pointer and cast
it by value.
void* myfunc(void* ptr) {
int data = ((int) ptr);
printf("%d ", data);
return NULL;
}
int main() {
// Each thread gets a different value of i to process
int i;
pthread_t tid;
for(i =0; i < 10; i++) {
pthread_create(&tid, NULL, myfunc, (void *)i);
}
pthread_exit(NULL);
}
Race conditions aren’t in our code. They can be in provided code Some
functions like asctime, getenv, strtok, strerror not
thread-safe. Let’s look at a simple function that is also not
‘thread-safe’. The result buffer could be stored in global memory.
This is good in a single-threaded program. We wouldn’t want to return a
pointer to an invalid address on the stack, but there’s only one result
buffer in the entire memory. If two threads were to use it at the same
time, one would corrupt the other.
char *to_message(int num) {
static char result [256];
if (num < 10) sprintf(result, "%d : blah blah" , num);
else strcpy(result, "Unknown");
return result;
}
There are ways around this like using synchronization locks, but first let’s do this by design. How would you fix the function above? You can change any of the parameters and any return types. Here is one valid solution.
int to_message_r(int num, char *buf, size_t nbytes) {
size_t written;
if (num < 10) {
written = snprintf(buf, nbtytes, "%d : blah blah" , num);
} else {
strncpy(buf, "Unknown", nbytes);
buf[nbytes] = '\0';
written = strlen(buf) + 1;
}
return written <= nbytes;
}
Instead of making the function responsible for the memory, we made the caller responsible! A lot of programs, and hopefully your programs, have minimal communication needed. Often a malloc call is less work than locking a mutex or sending a message to another thread.
Don’t Cross the Streams
A program can fork inside a process with multiple threads! However, the
child process only has a single thread, which is a clone of the thread
that called fork. We can see this as a simple example, where the
background threads never print out a second message in the child
process.
#include <pthread.h>
#include <stdio.h>
#include <unistd.h>
static pid_t child = -2;
void *sleepnprint(void *arg) {
printf("%d:%s starting up...\n", getpid(), (char *) arg);
while (child == -2) {sleep(1);} /* Later we will use condition variables */
printf("%d:%s finishing...\n",getpid(), (char*)arg);
return NULL;
}
int main() {
pthread_t tid1, tid2;
pthread_create(&tid1,NULL, sleepnprint, "New Thread One");
pthread_create(&tid2,NULL, sleepnprint, "New Thread Two");
child = fork();
printf("%d:%s\n",getpid(), "fork()ing complete");
sleep(3);
printf("%d:%s\n",getpid(), "Main thread finished");
pthread_exit(NULL);
return 0; /* Never executes */
}
8970:New Thread One starting up...
8970:fork()ing complete
8973:fork()ing complete
8970:New Thread Two starting up...
8970:New Thread Two finishing...
8970:New Thread One finishing...
8970:Main thread finished
8973:Main thread finished
In practice, creating threads before forking can lead to unexpected
errors because (as demonstrated above) the other threads are immediately
terminated when forking. Another thread might have locked a mutex like
by calling malloc and never unlock it again. Advanced users may find
pthread_atfork useful however we suggest a program avoid creating
threads before forking unless you fully understand the limitations and
difficulties of this approach.
Embarrassingly Parallel Problems
The study of parallel algorithms has exploded over the past few years. An embarrassingly parallel problem is any problem that needs little effort to turn parallel. A lot of them have some synchronization concepts with them but not always. You already know a parallelizable algorithm, Merge Sort!
void merge_sort(int *arr, size_t len){
if(len > 1){
// Merge Sort the left half
// Merge Sort the right half
// Merge the two halves
}
With your new understanding of threads, all you need to do is create a thread for the left half, and one for the right half. Given that your CPU has multiple real cores, you will see a speedup following https://en.wikipedia.org/wiki/Amdahl’s_law. The time complexity analysis gets interesting here as well. The parallel algorithm runs in running time because we have the analysis assumes that we have a lot of cores.
In practice though, we typically do two changes. One, once the array gets small enough, we ditch the Parallel Merge Sort algorithm and do conventional sort that works fast on small arrays, usually cache coherency rules at this level. The other thing that we know is that CPUs don’t have infinite cores. To get around that, we typically keep a worker pool. You won’t see the speedup right away because of things like cache coherency and scheduling extra threads. Over the bigger pieces of code though, you will start to see speedups.
Another embarrassingly parallel problem is parallel map. Say we want to apply a function to an entire array, one element at a time.
int *map(int (*func)(int), int *arr, size_t len){
int *ret = malloc(len*sizeof(*arr));
for(size_t i = 0; i < len; ++i) {
ret[i] = func(arr[i]);
}
return ret;
}
Since none of the elements depend on any other element, how would you go about parallelizing this? What do you think would be the best way to split up the work between threads.
Extra: Scheduling
There are a few ways to split up the work. These are common to the OpenMP framework (Silberschatz, Galvin, and Gagne #ref-silberschatz2005operating).
-
static schedulingbreaks up the problems into fixed-size chunks (predetermined) and have each thread work on each of the chunks. This works well when each of the subproblems takes roughly the same time because there is no additional overhead. All you need to do is write a loop and give the map function to each sub-array. -
dynamic schedulingas a new problem becomes available to have a thread serve it. This is useful when you don’t know how long the scheduling will take -
guided schedulingThis is a mix of the above with a mix of the benefits and tradeoffs. You start with static scheduling and move slowly to dynamic if needed -
runtime schedulingYou have absolutely no idea how long the problems are going to take. Instead of deciding it yourself, let the program decide what to do!
No need to memorize any of the scheduling routines though. Openmp is a standard that is an alternative to pthreads. For example, here is how to parallelize a for loop
#pragma omp parallel for
for (int i = 0; i < n; i++) {
// Do stuff
}
// Specify the scheduling as follows
// #pragma omp parallel for scheduling(static)
Static scheduling will divide the problem into fixed-size chunks Dynamic scheduling will give a job once the loop is over Guided scheduling is Dynamic with chunks Runtime is a whole bag of worms.
Other Problems
From https://en.wikipedia.org/wiki/Embarrassingly_parallel
-
Serving static files on a web server to multiple users at once.
-
The Mandelbrot set, Perlin noise, and similar images, where each point is calculated independently.
-
Rendering of computer graphics. In computer animation, each frame may be rendered independently (see parallel rendering).
-
Brute-force searches in cryptography.
-
Notable real-world examples include distributed.net and proof-of-work systems used in cryptocurrency.
-
BLAST searches in bioinformatics for multiple queries (but not for individual large queries)
-
Large scale facial recognition systems that compare thousands of arbitrary acquired faces (e.g., a security or surveillance video via closed-circuit television) with a similarly large number of previously stored faces (e.g., a rogues gallery or similar watch list).
-
Computer simulations comparing many independent scenarios, such as climate models.
-
Evolutionary computation meta-heuristics such as genetic algorithms.
-
Ensemble calculations of numerical weather prediction.
-
Event simulation and reconstruction in particle physics.
-
The marching squares algorithm
-
Sieving step of the quadratic sieve and the number field sieve.
-
Tree growth step of the random forest machine learning technique.
-
Discrete Fourier Transform where each harmonic is independently calculated.
Extra: threads.h
We have a lot of threading libraries discussed in the extra section. We have the standard POSIX threads, OpenMP threads, we also have a new C11 threading library that is built into the standard. This library provides restricted functionality.
Why use restricted functionality? The key is in the name. Since this is the C standard library, it has to be implemented in all operating systems that are compliant which are pretty much all of them. This means there is first-class portability when using threads.
We won’t drone on about the functions. Most of them are renaming of pthread functions anyway. If you ask why we don’t teach these, there are a few reasons
-
They are pretty new. Even though the standard came out in roughly 2011, POSIX threads have been around forever. A lot of their quirks have been ironed out.
-
You lose expressivity. This is a concept that we’ll talk about in later chapters, but when you make something portable, you lose some expressivity with the host hardware. That means that the threads.h library is pretty bare bones. It is hard to set CPU affinities. Schedule threads together. Efficiently look at the internals for performance reasons.
-
A lot of legacy code is already written with POSIX threads in mind. Other libraries like OpenMP, CUDA, MPI will either use POSIX processes or POSIX threads with a begrudging port to Windows.
Extra: Lightweight Processes?
In the beginning of the chapter, we mentioned that threads are processes. What do we mean by that? You can create a thread like a process Take a look at the example code below
// 8 KiB stacks
#define STACK_SIZE (8 * 1024 * 1024)
int thread_start(void *arg) {
// Just like the pthread function
puts("Hello Clone!")
// This share the same heap and address space!
return 0;
}
int main() {
// Allocate stack space for the child
char *child_stack = malloc(STACK_SIZE);
// Remember stacks work by growing down, so we need
// to give the top of the stack
char *stack_top = stack + STACK_SIZE;
// clone create thread
pid_t pid = clone(thread_start, stack_top, SIGCHLD, NULL);
if (pid == -1) {
perror("clone");
exit(1);
}
printf("Child pid %ld\n", (long) pid);
// Wait like any child
if (waitpid(pid, NULL, 0) == -1) {
perror("waitpid");
exit(1);
}
return 0;
}
It seems pretty simple right? Why not use this functionality? First, there is a decent bit of boilerplate code. In addition, pthreads are part of the POSIX standard and have defined functionality. Pthreads let a program set various attributes – some that resemble the option in clone – to customize your thread. But as we mentioned earlier, with each later of abstraction for portability reasons we lose some functionality. clone can do some neat things like keeping different parts of your heap the same while creating copies of other pages. A program has finer control of scheduling because it is a process with the same mappings.
At no time in this course should you be using clone. But in the future, know that it is a perfectly viable alternative to fork. You have to be careful and research edge cases.
Further Reading
Guiding questions
-
What is the first argument to pthread create?
-
What is the start routing in pthread create? How about arg?
-
Why might pthread create fail?
-
What are a few things that threads share in a process? What are a few things that threads have different?
-
How can a thread uniquely identify itself?
-
What are some examples of non thread safe library functions? Why might they not be thread safe?
-
How can a program stop a thread?
-
How can a program get back a thread’s “return value”?
Topics#
-
pthread life-cycle
-
Each thread has a stack
-
Capturing return values from a thread
-
Using
pthread_join -
Using
pthread_create -
Using
pthread_exit -
Under what conditions will a process exit
Questions#
-
What happens when a pthread gets created?
-
Where is each thread’s stack?
-
How does a program get a return value given a
pthread_t? What are the ways a thread can set that return value? What happens if a program discards the return value? -
Why is
pthread_joinimportant (think stack space, registers, return values)? -
What does
pthread_exitdo if it is not the last thread? What other functions are called when after calling pthread_exit? -
Give me three conditions under which a multi-threaded process will exit. Are there any more?
-
What is an embarrassingly parallel problem?